Esta é uma lista de algumas fórmulas de cálculo do vetor para trabalhar com sistemas comuns de coordenadas curvilíneas[nt 1].
Conversões de coordenadas
Conversão entre coordenadas cartesianas, cilíndricas e esféricas
|
|
De
|
| Cartesiano
|
Cilíndrico
|
Esférico
|
| Para
|
Cartesiano
|

|

|

|
| Cilíndrico
|

|

|

|
| Esférico
|

|

|

|
Conversões de vetor unitário
Conversão entre vetores unitários em sistemas de coordenadas cartesianas, cilíndricas e esféricas em termos de coordenadas de destino
|
|
Cartesiano
|
Cilíndrico
|
Esférico
|
| Cartesiano
|
não aplicável
|

|

|
| Cilíndrico
|

|
não aplicável
|

|
| Esférico
|

|

|
não aplicável
|
Conversão entre vetores unitários em sistemas de coordenadas cartesianas, cilíndricas e esféricas em termos de coordenadas de "fonte"
|
|
Cartesiano
|
Cilíndrico
|
Esférico
|
| Cartesiano
|
não aplicável
|

|

|
| Cilíndrico
|

|
não aplicável
|

|
| Esférico
|

|

|
não aplicável
|
Fórmula Del
Tabela com o operador del em coordenadas cartesianas, cilíndricas e esféricas
| Operação
|
Coordenadas cartesianas (x, y, z)
|
Coordenadas cilíndricas (ρ, φ, z)
|
Coordenadas esféricas (r, θ, φ), onde  é o polar e θ é o ângulo azimutal α é o polar e θ é o ângulo azimutal α
|
| campo vetorial A
|

|

|

|
| Gradiente ∇f
|

|

|

|
| Divergência ∇ ⋅ A
|

|

|

|
| Rotacional ∇ × A
|

|

|

|
| Operador de Laplace ∇2f ≡ ∆f
|

|

|

|
| Vetor de Laplace ∇2A ≡ ∆A
|

|

|
 }}
}}
|
| Derivada materialα[1] (A ⋅ ∇)B
|

|

|
 }}
}}
|
| tensor divergente ∇ ⋅ T
|

|
![{\displaystyle {\begin{aligned}\left[{\frac {\partial T_{\rho \rho }}{\partial \rho }}+{\frac {1}{\rho }}{\frac {\partial T_{\varphi \rho }}{\partial \varphi }}+{\frac {\partial T_{z\rho }}{\partial z}}+{\frac {1}{\rho }}(T_{\rho \rho }-T_{\varphi \varphi })\right]&{\hat {\boldsymbol {\rho }}}\\+\left[{\frac {\partial T_{\rho \varphi }}{\partial \rho }}+{\frac {1}{\rho }}{\frac {\partial T_{\varphi \varphi }}{\partial \varphi }}+{\frac {\partial T_{z\varphi }}{\partial z}}+{\frac {1}{\rho }}(T_{\rho \varphi }+T_{\varphi \rho })\right]&{\hat {\boldsymbol {\varphi }}}\\+\left[{\frac {\partial T_{\rho z}}{\partial \rho }}+{\frac {1}{\rho }}{\frac {\partial T_{\varphi z}}{\partial \varphi }}+{\frac {\partial T_{zz}}{\partial z}}+{\frac {T_{\rho z}}{\rho }}\right]&{\hat {\mathbf {z} }}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3116bd7e75151c8d599b5e090d2433daffa21069)
|
![{\displaystyle {\begin{aligned}\left[{\frac {\partial T_{rr}}{\partial r}}+2{\frac {T_{rr}}{r}}+{\frac {1}{r}}{\frac {\partial T_{\theta r}}{\partial \theta }}+{\frac {\cot \theta }{r}}T_{\theta r}+{\frac {1}{r\sin \theta }}{\frac {\partial T_{\varphi r}}{\partial \varphi }}-{\frac {1}{r}}(T_{\theta \theta }+T_{\varphi \varphi })\right]&{\hat {\mathbf {r} }}\\+\left[{\frac {\partial T_{r\theta }}{\partial r}}+2{\frac {T_{r\theta }}{r}}+{\frac {1}{r}}{\frac {\partial T_{\theta \theta }}{\partial \theta }}+{\frac {\cot \theta }{r}}T_{\theta \theta }+{\frac {1}{r\sin \theta }}{\frac {\partial T_{\varphi \theta }}{\partial \varphi }}+{\frac {T_{\theta r}}{r}}-{\frac {\cot \theta }{r}}T_{\varphi \varphi }\right]&{\hat {\boldsymbol {\theta }}}\\+\left[{\frac {\partial T_{r\varphi }}{\partial r}}+2{\frac {T_{r\varphi }}{r}}+{\frac {1}{r}}{\frac {\partial T_{\theta \varphi }}{\partial \theta }}+{\frac {1}{r\sin \theta }}{\frac {\partial T_{\varphi \varphi }}{\partial \varphi }}+{\frac {T_{\varphi r}}{r}}+{\frac {\cot \theta }{r}}(T_{\theta \varphi }+T_{\varphi \theta })\right]&{\hat {\boldsymbol {\varphi }}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/89522d9531233ee5f0a581ec441bb20c337a13b8)
|
| Deslocamento diferencial dℓ
|

|

|

|
| Área normal diferencial dS
|

|

|

|
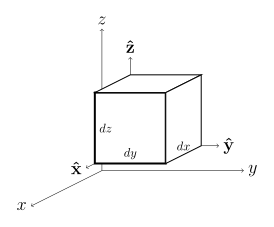
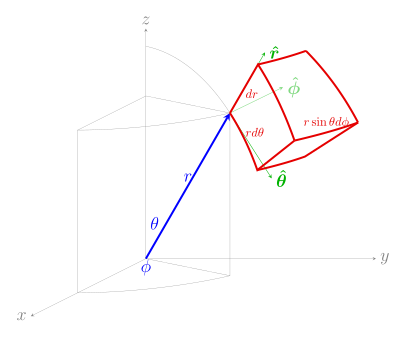
| Volume diferencialdV
|

|

|

|
- ↑α Esta página usa
 para o ângulo polar e para o ângulo azimutal, que é uma notação comum na física. A fonte que é usada para essas fórmulas usa para o ângulo azimutal e para o ângulo polar, que é uma notação matemática comum. Para obter as fórmulas de matemática, altere e nas fórmulas mostradas na tabela acima.
para o ângulo polar e para o ângulo azimutal, que é uma notação comum na física. A fonte que é usada para essas fórmulas usa para o ângulo azimutal e para o ângulo polar, que é uma notação matemática comum. Para obter as fórmulas de matemática, altere e nas fórmulas mostradas na tabela acima.
Regras de cálculo não triviais



 (Fórmula de Lagrange para del)
(Fórmula de Lagrange para del)
Derivação cartesiana


As expressões para  e
e  são encontradas da mesma maneira.[nt 2]
são encontradas da mesma maneira.[nt 2]
Derivação cilíndrica






Derivação esférica





Notas
- ↑ Este artigo usa a notação padrão ISO 80000-2, que substitui a ISO 31-11, para coordenadas esféricas (outras fontes podem reverter as definições de θ e φ):
- O ângulo polar é denotado por θ: é o ângulo entre o eixo z e o vetor radial que liga a origem ao ponto em questão.
- O ângulo azimutal é denotado por φ: é o ângulo entre o eixo x e a projeção do vetor radial no plano xy.
A função atan2 (y, x) pode ser usada em vez da função matemática arctan (y/x) devido ao seu domínio e imagem. A função arctan clássica possui uma imagem de (−π/2, +π/2), enquanto que atan2 é definido como tendo uma imagem de (−π, π).
- ↑ "curl" querer dizer "Rotacional"
Referências


